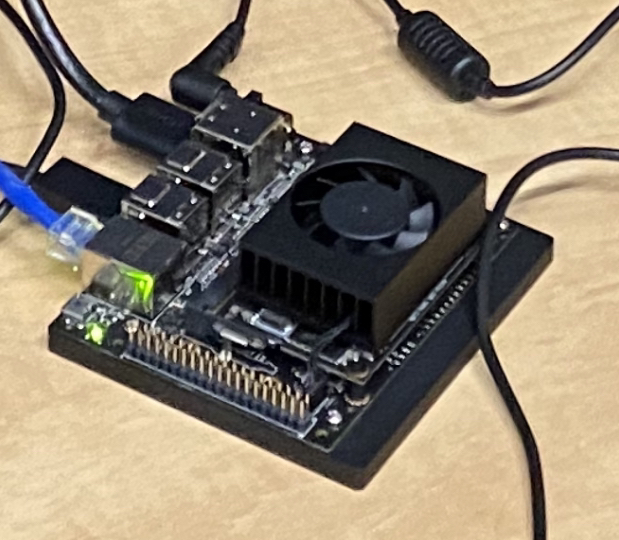
- Employed the Intel RealSense SDK and OpenCV in Python to configure a
Nvidia Jetson Xavier NX for real-time depth and color frame streaming from an Intel RealSense
D435i camera. Advanced image processing converted frames to numpy arrays and applied color
maps to depth images for side-by-side display,demonstrating proficiency in depth mapping.
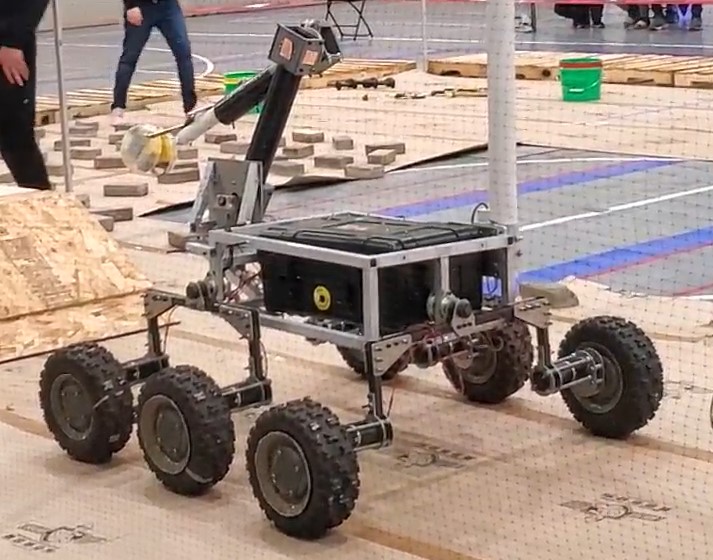
- Isaac ROS SLAM (Simultaneous Localization and Mapping) nodes for point cloud extraction and rosbag recording. This process
was visualized in RViz. The point cloud map produced was instrumental for autonomous
navigation, facilitating future integration with Nav2. Key Robotics Club milestone.
Completed - Sept 2023
Nvidia Jetson (Xavier NX)
Python
ROS 2 (Humble)
Docker
Linux (Debian)
Intel Realsense SDK
Computer Vision
Image Processing
SLAM
Data Visualization